Общие сведения о программе
«КОМПАС» – семейство систем автоматизированного проектирования с возможностями оформления проектной и конструкторской документации согласно стандартам серии ЕСКД и СПДС.
Разрабатывается российской компанией «Аскон». Название линейки является акронимом от фразы «КОМПлекс Автоматизированных Систем».
Первый выпуск «Компаса» (версия 1.0) состоялся в 1989 году. Первая версия под Windows — «Компас 5.0» — вышла в 1997 году.
Используемый в данном пособии КОМПАС-3D LT V12 – доступный для всех программный продукт, лёгкий в освоении и использовании, полностью русскоязычный, поддерживающий отечественные стандарты. Он специально создан для решения задач частных пользователей и учащихся. КОМПАС-3D LT позволяет создавать только трёхмерные модели деталей и чертежи. Программа абсолютно универсальна, может применяться в любых областях деятельности, позволяет моделировать и вычерчивать абсолютно любые изделия, любые формы.
Профессиональная версия системы КОМПАС-3D обладает существенно более широкими (по сравнению с КОМПАС-3D LT) средствами автоматизированного проектирования.
Пример модели «Шестерня»
3. Общие принципы моделирования
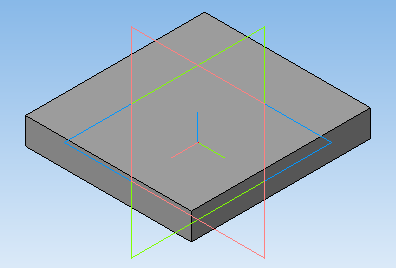
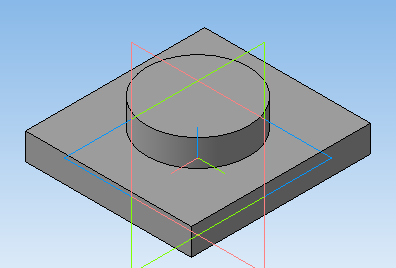
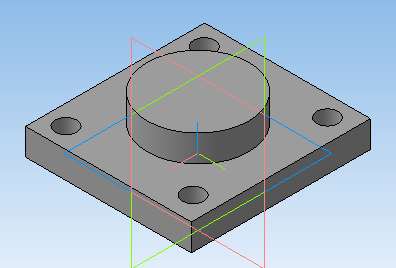
Общепринятым порядком моделирования твёрдого тела является последовательное выполнение булевых операций (объединения, вычитания и пересечения) над объёмными элементами (сферами, призмами, цилиндрами, конусами, пирамидами и т.д.). Пример выполнения таких операций показан на рис. 1.
Рассмотрим образование основных объёмных элементов.
а) б) в)
Рис. 1. Булевы операции над объёмными элементами:
а) построение параллелепипеда; б) объединение параллелепипеда и цилиндра; в) вычитание цилиндров из параллелепипеда
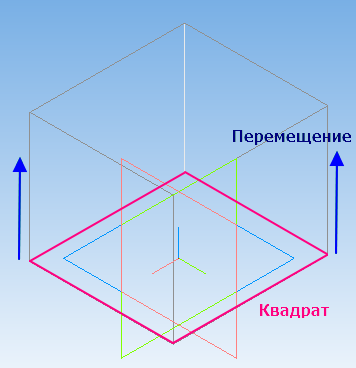
Для образования призмы необходимо произвести перемещение или вытягивание плоской фигуры в пространстве (рис. 2). Для получения куба или параллелепипеда необходимо произвести перемещение прямоугольника или квадрата, для получения цилиндра – круга, для получения призмы - шестигранника и т.д.
а) б)
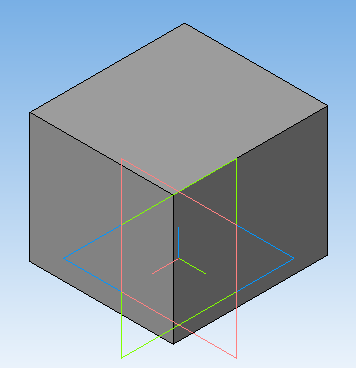
Рис. 2. Образование куба:
а – перемещение квадрата; б – полученный объект
Для образования объектов вращения, таких, как тор, цилиндр, конус, необходимо произвести поворот или вращение фигуры относительно оси (рис 3).
Примерами деталей, которые можно моделировать таким способом являются следующие детали: валы, колёса, ролики, шайбы, диски, шкивы, и т.д. Для образования более сложных объектов, необходимо произвести перемещение фигуры по заданной траектории (рис.4).Поэтому такие геометрические тела называются кинематическими объектами. В качестве примера таких объектов можно привести следующие детали: рычаги сложной формы, шатуны, вилки, резьба на деталях, шлицы и шпоночные пазы, и т.д.
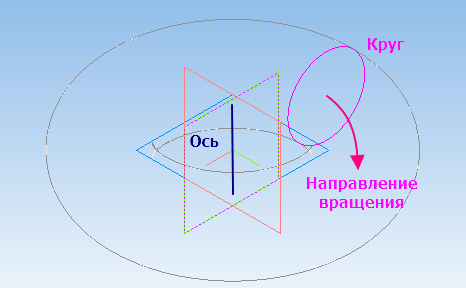
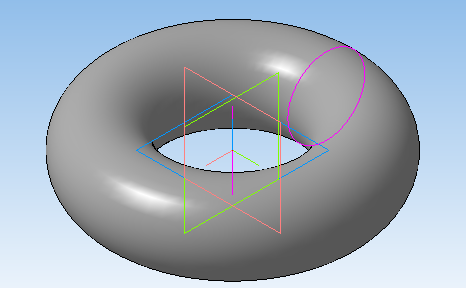
Рис. 3. Образование тора:
а – вращение круга относительно оси; б - полученный объект
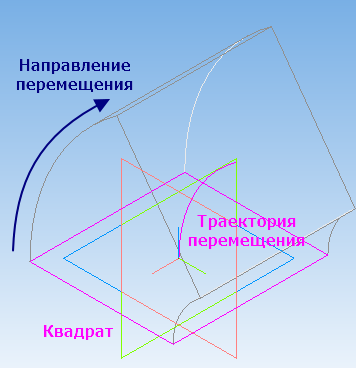
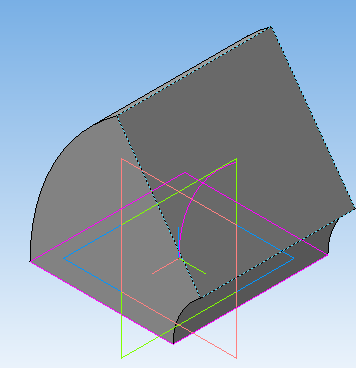
Рис. 4. Образование кинематического объекта:
а – перемещение квадрата по заданной траектории; б – полученный объект
Для построения кинематического объекта (рис. 4) также применяется два эскиза: эскиз, являющийся основой для построения и эскиз, который представляет собой траекторию перемещения основного эскиза. При построении объекта по сечениям (рис. 5) может использоваться большее количество основных эскизов, в отличие от предыдущих способов построения. На примере показано использование четырёх основных эскизов – сечений под номерами 1, 2, 3 и 4. Если модель, выполняемая при помощи сечении сложна, то может использоваться дополнительные эскизы – эскизы-траектории, по которым осуществляется соединение эскизов-сечений.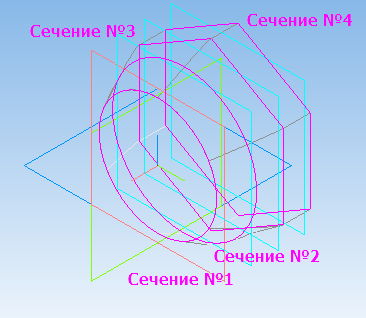
а) б)
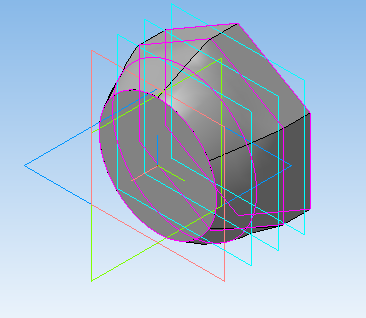
Рис. 5. Образование объекта по сечениям:
а – перемещение сечений от сечения №1 до сечения №4; б – полученный объект